



ಸ್ಟ್ಯಾಂಪಿಂಗ್/ ಸ್ಟ್ಯಾಕಿಂಗ್ ರೋಬೋಟ್ SDCX RMD-300/200/160/120/35/08/110/20/50
ತಾಂತ್ರಿಕ ನಿಯತಾಂಕಗಳು
| ಮಾದರಿ ಸಂಖ್ಯೆ. | ಸ್ವಾತಂತ್ರ್ಯದ ಪದವಿ | ಚಾಲನಾ ಮೋಡ್ | ಪೇಲೋಡ್ (ಕೆಜಿ) | ಪುನರಾವರ್ತಿತ ಸ್ಥಾನೀಕರಣ ನಿಖರತೆ (ಮಿಮೀ) | ಚಲನೆಯ ವ್ಯಾಪ್ತಿ (°) | ಗರಿಷ್ಠ ವೇಗ (°/ಸೆ) | ಮಣಿಕಟ್ಟಿನ ಅನುಮತಿಸಬಹುದಾದ ಹೊರೆ ಜಡತ್ವ (ಕೆಜಿ · ಮೀ2) | ವೃತ್ತಾಕಾರದ ಬಡಿತ (ಚಕ್ರ/ಗಂಟೆ) | ಚಲನೆಯ ತ್ರಿಜ್ಯ (ಮಿಮೀ) | ಸ್ಥಳೀಯ ತೂಕ (ಕೆಜಿ) | ||||||
| J1 | J2 | J3 | J4 | J1 | J2 | J3 | J4 | |||||||||
| SDCX-RMD300 ಪರಿಚಯ | 4 | AC ಸರ್ವೋ ಡ್ರೈವ್ | 300 | ±0.5 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 85 | 90 | 100 (100) | 190 (190) | 134 (134) | 1000③ ③ ಡೀಲರ್ | 3150 | 1500 |
| SDCX-RMD200 ಪರಿಚಯ | 4 | AC ಸರ್ವೋ ಡ್ರೈವ್ | 200 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 105 | 107 (107) | 114 (114) | 242 | 78 | 1300 · 1300 ·③ ③ ಡೀಲರ್ | 3150 | 1500 |
| SDCX-RMD160 ಪರಿಚಯ | 4 | AC ಸರ್ವೋ ಡ್ರೈವ್ | 160 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 123 | 123 | 128 (128) | 300 | 78 | 1500③ ③ ಡೀಲರ್ | 3150 | 1500 |
| SDCX-RMD120 ಪರಿಚಯ | 4 | AC ಸರ್ವೋ ಡ್ರೈವ್ | 120 (120) | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 128 (128) | 126 (126) | 135 (135) | 300 | 78 | 1560③ ③ ಡೀಲರ್ | 3150 | 1500 |
| SDCX-RMD50 ಪರಿಚಯ | 4 | AC ಸರ್ವೋ ಡ್ರೈವ್ | 50 | ±0.2 | ±178 | ± +90~-40 | ± +65~-78 | ±360 | 171 (ಅನುವಾದ) | 171 (ಅನುವಾದ) | 171 (ಅನುವಾದ) | 222 (222) | 4.5 | 1700 ·② (ಮಾಹಿತಿ) | 2040 | 660 #660 |
| SDCX-RMD20 ಪರಿಚಯ | 4 | AC ಸರ್ವೋ ಡ್ರೈವ್ | 20 | ±0.08 | ±1170 | ± +115~-25 | ± +70~-90 | ±360 | 170 | 170 | 185 (ಪುಟ 185) | 330 · | 0.51 (0.51) | 1780① (ಓದಿ) | 1720 | 256 (256) |
| SDCX-RMD08 | 4 | AC ಸರ್ವೋ ಡ್ರೈವ್ | 8 | ±0.08 | ±170 | ± +90~-40 | ± +68~-90 | ±360 | 251 (ಅನುವಾದ) | 195 (ಪುಟ 195) | 195 (ಪುಟ 195) | 367.5 | 0.25 | 1800 ರ ದಶಕದ ಆರಂಭ① (ಓದಿ) | 1433 | 180 (180) |
ಟೀಕೆಗಳು:
① ಪರೀಕ್ಷಾ ಟ್ರ್ಯಾಕ್ 150mm ಎತ್ತರ ಮತ್ತು 1000mm ಅಗಲವಿದೆ, ಮತ್ತು ನಿಜವಾದ ಸೈಕಲ್ ಸಮಯವು ನಿಜವಾದ ಕೆಲಸದ ಪರಿಸ್ಥಿತಿಗಳಿಂದ ಪ್ರಭಾವಿತವಾಗಿರುತ್ತದೆ;
② ಪರೀಕ್ಷಾ ಟ್ರ್ಯಾಕ್ 200mm ಎತ್ತರ ಮತ್ತು 1000mm ಅಗಲವಿದೆ, ಮತ್ತು ನಿಜವಾದ ಸೈಕಲ್ ಸಮಯವು ನಿಜವಾದ ಕೆಲಸದ ಪರಿಸ್ಥಿತಿಗಳಿಂದ ಪ್ರಭಾವಿತವಾಗಿರುತ್ತದೆ;
③ ಪರೀಕ್ಷಾ ಟ್ರ್ಯಾಕ್ 400mm ಎತ್ತರ ಮತ್ತು 2000mm ಅಗಲವಿದೆ, ಮತ್ತು ನಿಜವಾದ ಸೈಕಲ್ ಸಮಯವು ನಿಜವಾದ ಕೆಲಸದ ಪರಿಸ್ಥಿತಿಗಳಿಂದ ಪ್ರಭಾವಿತವಾಗಿರುತ್ತದೆ;
ದಹಿಸುವ, ಸ್ಫೋಟಕ ಮತ್ತು ನಾಶಕಾರಿ ಅನಿಲಗಳು ಮತ್ತು ದ್ರವಗಳ ಸಂಪರ್ಕವನ್ನು ತಪ್ಪಿಸಿ; ನೀರು, ಎಣ್ಣೆ ಮತ್ತು ಧೂಳಿನಿಂದ ಸಿಂಪಡಿಸಬೇಡಿ; ವಿದ್ಯುತ್ ಶಬ್ದ ಮೂಲಗಳಿಂದ (ಪ್ಲಾಸ್ಮಾ) ದೂರವಿರಿ.
ಚಲನೆಯ ವ್ಯಾಪ್ತಿ
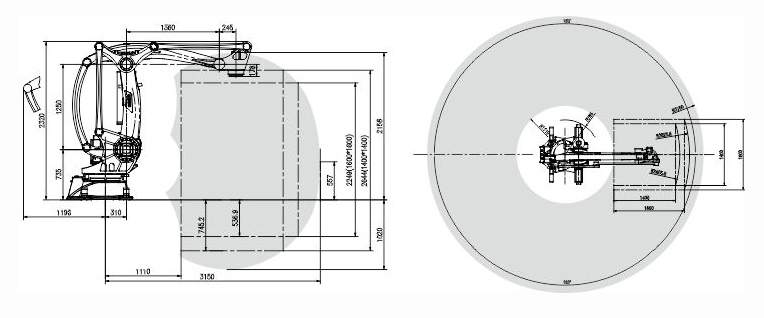
SDCX-RMD300/200/160/120 ಗಾಗಿ ಚಲನೆಯ ಶ್ರೇಣಿಯ ನಕ್ಷೆ
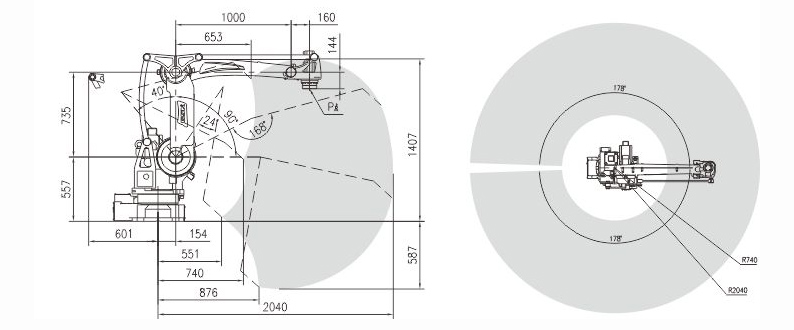
SDCX-RMD20 ಗಾಗಿ ಚಲನೆಯ ಶ್ರೇಣಿಯ ನಕ್ಷೆ
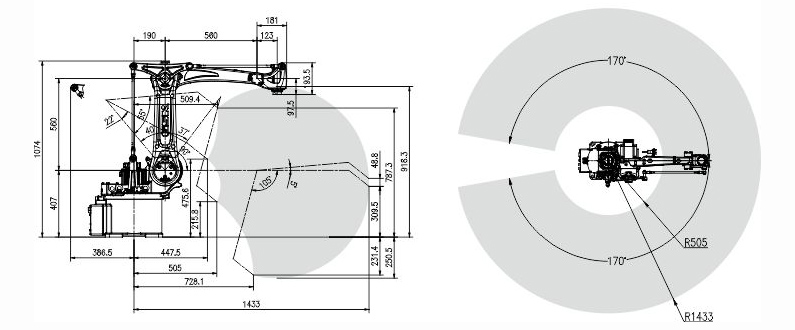
SDCX-RMD08 ಗಾಗಿ ಚಲನೆಯ ಶ್ರೇಣಿಯ ನಕ್ಷೆ
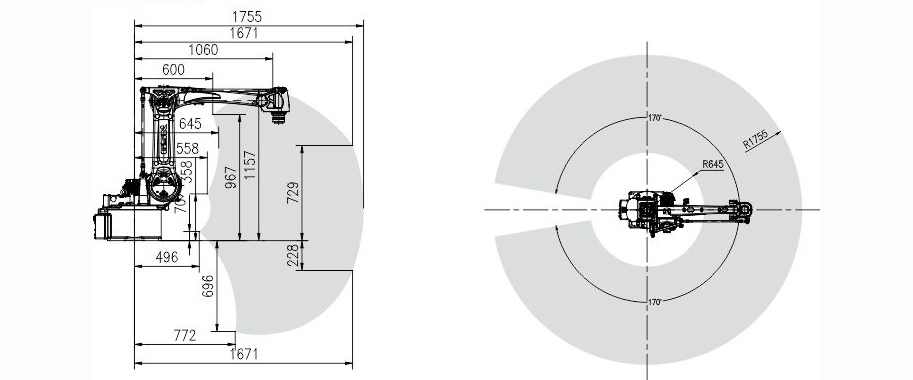
SDCX-RMD50 ಗಾಗಿ ಚಲನೆಯ ಶ್ರೇಣಿಯ ನಕ್ಷೆ
ಉತ್ಪನ್ನ ಅಪ್ಲಿಕೇಶನ್ ಪ್ರದರ್ಶನ
ಪರಿಹಾರಗಳು
ಉಕ್ಕಿನ ಸುರುಳಿ ನಿರ್ವಹಣಾ ಯೋಜನೆಯ ತಾಂತ್ರಿಕ ಯೋಜನೆ












