




ಸಿ/ಎಲ್/ಯು ಟೈಪ್ ಡ್ಯುಯಲ್ ಆಕ್ಸಿಸ್ ಸರ್ವೋ ಪೊಸಿಷನರ್
ತಾಂತ್ರಿಕ ನಿಯತಾಂಕಗಳು
| ಸಿ-ಟೈಪ್ ಡಬಲ್-ಆಕ್ಸಿಸ್ ಸರ್ವೋ ಪೊಸಿಷನರ್ | ಎಲ್-ಟೈಪ್ ಡಬಲ್-ಆಕ್ಸಿಸ್ ಸರ್ವೋ ಪೊಸಿಷನರ್ | ಯು-ಟೈಪ್ ಡಬಲ್-ಆಕ್ಸಿಸ್ ಸರ್ವೋ ಪೊಸಿಷನರ್ | |||||||||||
| ಕ್ರಮ ಸಂಖ್ಯೆ | ಯೋಜನೆಗಳು | ಪ್ಯಾರಾಮೀಟರ್ | ಪ್ಯಾರಾಮೀಟರ್ | ಪ್ಯಾರಾಮೀಟರ್ | ಟಿಪ್ಪಣಿಗಳು | ಪ್ಯಾರಾಮೀಟರ್ | ಪ್ಯಾರಾಮೀಟರ್ | ಪ್ಯಾರಾಮೀಟರ್ | ಟಿಪ್ಪಣಿಗಳು | ಪ್ಯಾರಾಮೀಟರ್ | ಪ್ಯಾರಾಮೀಟರ್ | ಪ್ಯಾರಾಮೀಟರ್ | ಟಿಪ್ಪಣಿಗಳು |
| 1 | ರೇಟ್ ಮಾಡಲಾದ ಲೋಡ್ | 200 ಕೆ.ಜಿ. |
500 ಕೆ.ಜಿ. | 1000 ಕೆ.ಜಿ. | ಎರಡನೇ ಅಕ್ಷದ R400mm/R400mm /R600mm ತ್ರಿಜ್ಯದೊಳಗೆ | 500 ಕೆ.ಜಿ. | 1000 ಕೆ.ಜಿ. | 2000 ಕೆ.ಜಿ. | ಎರಡನೇ ಅಕ್ಷದ R400mm/R600mm /R800mm ತ್ರಿಜ್ಯದೊಳಗೆ | 1000 ಕೆ.ಜಿ. | 3000 ಕೆ.ಜಿ. | 5000 ಕೆಜಿ | ಎರಡನೇ ಅಕ್ಷದ R600mm/R1500mm /R2000mm ತ್ರಿಜ್ಯದೊಳಗೆ |
| 2 | ಪರಿಭ್ರಮಣದ ಪ್ರಮಾಣಿತ ತ್ರಿಜ್ಯ | R400ಮಿಮೀ | R400ಮಿಮೀ | R600ಮಿಮೀ |
| R400ಮಿಮೀ | R600ಮಿಮೀ | R800ಮಿಮೀ |
| R600ಮಿಮೀ | R1500ಮಿಮೀ | R2000ಮಿಮೀ |
|
| 3 | ಮೊದಲ ಅಕ್ಷದ ತಿರುವು ಕೋನ | ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
|
| 4 | ಎರಡನೇ ಅಕ್ಷದ ತಿರುಗುವಿಕೆಯ ಕೋನ | ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
|
| 5 | ಮೊದಲ ಅಕ್ಷದ ಅಂದಾಜು ಮೇಲ್ಮುಖ ವೇಗ | 50°/ಸೆ | 50°/ಸೆ | 15°/ಸೆ |
| 50°/ಸೆ | 50°/ಸೆ | 17°/ಸೆ |
| 17°/ಸೆ | 17°/ಸೆ | 17°/ಸೆ |
|
| 6 | ಎರಡನೇ ಅಕ್ಷದ ಅಂದಾಜು ತಿರುಗುವ ವೇಗ | 70°/ಸೆ | 70°/ಸೆ | 70°/ಸೆ |
| 70°/ಸೆ | 70°/ಸೆ | 17°/ಸೆ |
| 24°/ಸೆ | 17°/ಸೆ | 24°/ಸೆ |
|
| 7 | ಸ್ಥಾನೀಕರಣ ನಿಖರತೆಯನ್ನು ಪುನರಾವರ್ತಿಸಿ | ±0.10ಮಿಮೀ | ±0.15ಮಿಮೀ | ±0.20ಮಿಮೀ |
| ±0.10ಮಿಮೀ | ±0.10ಮಿಮೀ | 17°/ಸೆ |
| ±0.15ಮಿಮೀ | ±0.20ಮಿಮೀ | ±0.25ಮಿಮೀ |
|
| 8 | ಸ್ಥಳಾಂತರ ಚೌಕಟ್ಟಿನ ಗಡಿ ಆಯಾಮ (ಉದ್ದ×ಅಗಲ×ಎತ್ತರ) | 1200ಮಿಮೀ×600ಮಿಮೀ ×70ಮಿಮೀ | 1600ಮಿಮೀ×800ಮಿಮೀ ×90ಮಿಮೀ | 2000ಮಿಮೀ×1200ಮಿಮೀ ×90ಮಿಮೀ |
| - | - | - |
| - | - | - |
|
| 9 | ಸ್ಥಾನ ಬದಲಾಯಿಸುವ ಸಾಧನದ ಒಟ್ಟಾರೆ ಆಯಾಮ (ಉದ್ದ×ಅಗಲ×ಎತ್ತರ) | 2000ಮಿಮೀ×1100ಮಿಮೀ ×1700ಮಿಮೀ | 2300ಮಿಮೀ×1200ಮಿಮೀ ×1900ಮಿಮೀ | 2700ಮಿಮೀ×1500ಮಿಮೀ ×2200ಮಿಮೀ |
| 1500ಮಿಮೀ×500ಮಿಮೀ ×850ಮಿಮೀ | 2000ಮಿಮೀ×750ಮಿಮೀ ×1200ಮಿಮೀ | 2400ಮಿಮೀ×900ಮಿಮೀ ×1600ಮಿಮೀ |
| 4200ಮಿಮೀ×700ಮಿಮೀ ×1800ಮಿಮೀ | 5500ಮಿಮೀ×900ಮಿಮೀ ×2200ಮಿಮೀ | 6500ಮಿಮೀ×1200ಮಿಮೀ ×2600ಮಿಮೀ |
|
| 10 | ಸ್ಟ್ಯಾಂಡರ್ಡ್ ಎರಡು-ಅಕ್ಷದ ರೋಟರಿ ಪ್ಲೇಟ್ | - | - | - | - | Φ800ಮಿಮೀ | Φ1200ಮಿಮೀ | Φ1500ಮಿಮೀ |
| Φ1500ಮಿಮೀ | Φ1800ಮಿಮೀ | Φ2000ಮಿಮೀ |
|
| 11 | ಮೊದಲ ಅಕ್ಷದ ತಿರುಗುವಿಕೆಯ ಮಧ್ಯದ ಎತ್ತರ
| 1200ಮಿ.ಮೀ. | 1350ಮಿ.ಮೀ | 1600ಮಿ.ಮೀ |
| 550ಮಿ.ಮೀ | 800ಮಿ.ಮೀ. | 1000ಮಿ.ಮೀ. |
| 1500ಮಿ.ಮೀ. | 1750ಮಿ.ಮೀ | 2200ಮಿ.ಮೀ. |
|
| 12 | ವಿದ್ಯುತ್ ಸರಬರಾಜು ಪರಿಸ್ಥಿತಿಗಳು | ಮೂರು-ಹಂತ 200V±10%50HZ | ಮೂರು-ಹಂತ 200V±10%50HZ | ಮೂರು-ಹಂತ 200V±10%50HZ | ಐಸೊಲೇಷನ್ ಟ್ರಾನ್ಸ್ಫಾರ್ಮರ್ನೊಂದಿಗೆ | ಮೂರು-ಹಂತ 200V±10%50HZ | ಮೂರು-ಹಂತ 200V±10%50HZ | ಮೂರು-ಹಂತ 200V±10%50HZ | ಐಸೊಲೇಷನ್ ಟ್ರಾನ್ಸ್ಫಾರ್ಮರ್ನೊಂದಿಗೆ | ಮೂರು-ಹಂತ 200V±10%50HZ | ಮೂರು-ಹಂತ 200V±10%50HZ | ಮೂರು-ಹಂತ 200V±10%50HZ | ಐಸೊಲೇಷನ್ ಟ್ರಾನ್ಸ್ಫಾರ್ಮರ್ನೊಂದಿಗೆ |
| 13 | ನಿರೋಧನ ವರ್ಗ | H | H | H |
| H | H | H |
| H | H | H |
|
| 14 | ಸಲಕರಣೆಗಳ ನಿವ್ವಳ ತೂಕ | ಸುಮಾರು 800 ಕೆ.ಜಿ. | ಸುಮಾರು 1300 ಕೆ.ಜಿ. | ಸುಮಾರು 2000 ಕೆ.ಜಿ. |
| ಸುಮಾರು 900 ಕೆ.ಜಿ. | ಸುಮಾರು 1600 ಕೆ.ಜಿ. | ಸುಮಾರು 2500 ಕೆ.ಜಿ. |
| ಸುಮಾರು 2200 ಕೆ.ಜಿ. | ಸುಮಾರು 4000 ಕೆ.ಜಿ. | ಸುಮಾರು 6000 ಕೆ.ಜಿ. | |
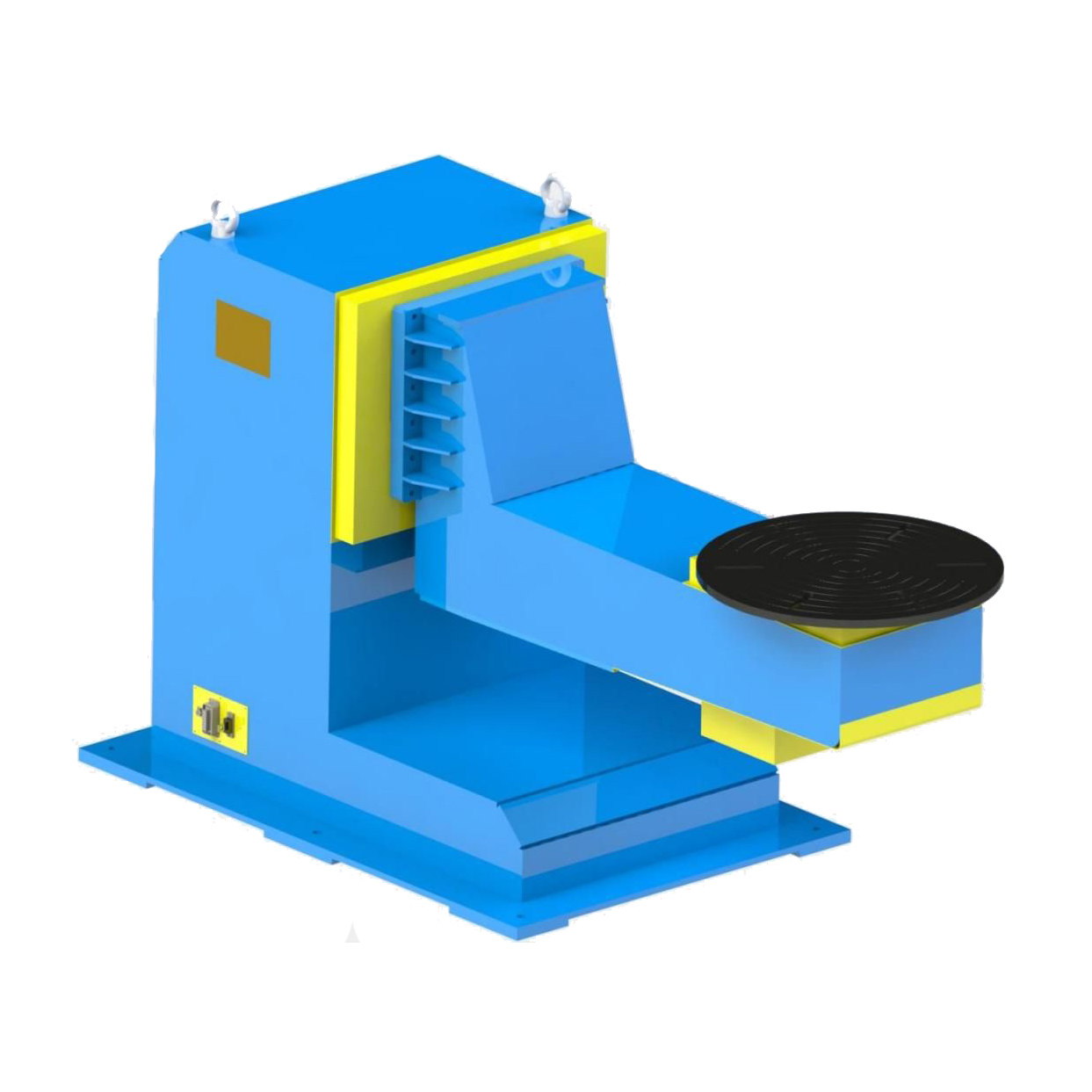
ಸಿ-ಟೈಪ್ ಡಬಲ್-ಆಕ್ಸಿಸ್ ಸರ್ವೋ ಪೊಸಿಷನರ್
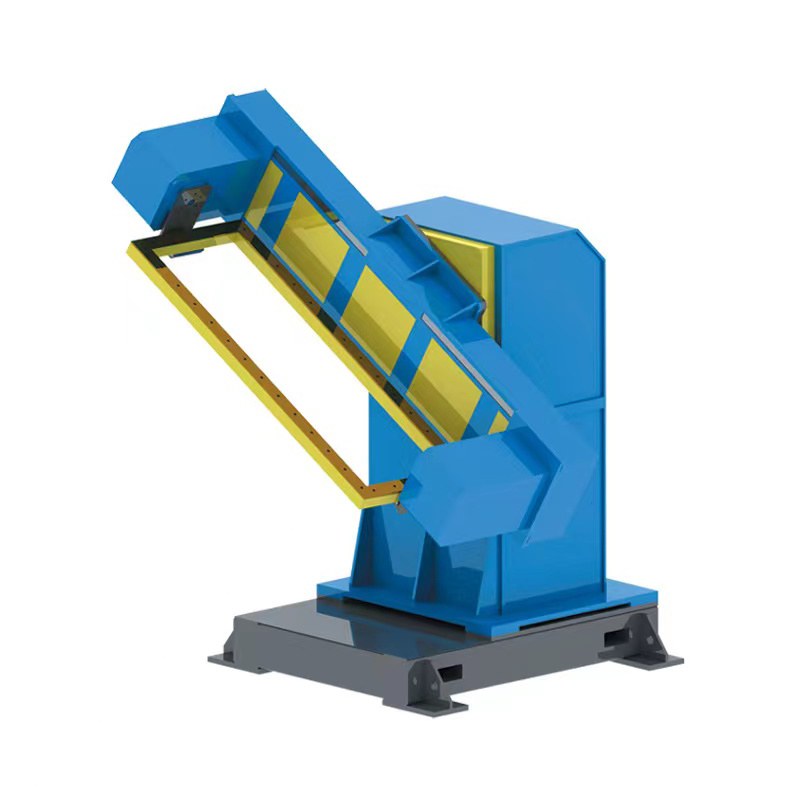
ಎಲ್-ಟೈಪ್ ಡಬಲ್-ಆಕ್ಸಿಸ್ ಸರ್ವೋ ಪೊಸಿಷನರ್

ಯು-ಟೈಪ್ ಡಬಲ್-ಆಕ್ಸಿಸ್ ಸರ್ವೋ ಪೊಸಿಷನರ್
ರಚನೆ ಪರಿಚಯ
ಡ್ಯುಯಲ್ ಆಕ್ಸಿಸ್ ಸರ್ವೋ ಪೊಸಿಷನರ್ ಮುಖ್ಯವಾಗಿ ವೆಲ್ಡ್ ಮಾಡಿದ ಇಂಟಿಗ್ರಲ್ ಫ್ರೇಮ್, ವೆಲ್ಡಿಂಗ್ ಡಿಸ್ಪ್ಲೇಸ್ಮೆಂಟ್ ಫ್ರೇಮ್, ಎಸಿ ಸರ್ವೋ ಮೋಟಾರ್ ಮತ್ತು ಆರ್ವಿ ನಿಖರತೆ ಕಡಿತಗೊಳಿಸುವಿಕೆ, ರೋಟರಿ ಬೆಂಬಲ, ವಾಹಕ ಕಾರ್ಯವಿಧಾನ, ರಕ್ಷಣಾತ್ಮಕ ಗುರಾಣಿ ಮತ್ತು ವಿದ್ಯುತ್ ನಿಯಂತ್ರಣ ವ್ಯವಸ್ಥೆಯನ್ನು ಒಳಗೊಂಡಿದೆ. ವೆಲ್ಡ್ ಮಾಡಿದ ಇಂಟಿಗ್ರಲ್ ಫ್ರೇಮ್ ಅನ್ನು ಉತ್ತಮ-ಗುಣಮಟ್ಟದ ಪ್ರೊಫೈಲ್ಗಳೊಂದಿಗೆ ವೆಲ್ಡ್ ಮಾಡಲಾಗುತ್ತದೆ. ಅನೆಲಿಂಗ್ ಮತ್ತು ಒತ್ತಡ ನಿವಾರಣೆಯ ನಂತರ, ಪ್ರಮುಖ ಸ್ಥಾನಗಳ ಹೆಚ್ಚಿನ ಯಂತ್ರ ನಿಖರತೆ ಮತ್ತು ನಿಖರತೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ವೃತ್ತಿಪರ ಯಂತ್ರದ ಮೂಲಕ ಇದನ್ನು ಸಂಸ್ಕರಿಸಬೇಕು. ಮೇಲ್ಮೈಯನ್ನು ಆಂಟಿ-ರಸ್ಟ್ ಗೋಚರಿಸುವಿಕೆಯ ಬಣ್ಣದಿಂದ ಸಿಂಪಡಿಸಲಾಗುತ್ತದೆ, ಇದು ಸುಂದರ ಮತ್ತು ಉದಾರವಾಗಿದೆ ಮತ್ತು ಗ್ರಾಹಕರ ಅವಶ್ಯಕತೆಗಳಿಗೆ ಅನುಗುಣವಾಗಿ ಬಣ್ಣವನ್ನು ಕಸ್ಟಮೈಸ್ ಮಾಡಬಹುದು.
ಬೆಸುಗೆ ಹಾಕಿದ ಸ್ಥಳಾಂತರ ಚೌಕಟ್ಟನ್ನು ಉತ್ತಮ ಗುಣಮಟ್ಟದ ಪ್ರೊಫೈಲ್ ಸ್ಟೀಲ್ನಿಂದ ಬೆಸುಗೆ ಹಾಕಿ ಅಚ್ಚು ಮಾಡಬೇಕು ಮತ್ತು ವೃತ್ತಿಪರ ಯಂತ್ರದಿಂದ ಸಂಸ್ಕರಿಸಬೇಕು. ಸ್ಥಾನಿಕ ಉಪಕರಣವನ್ನು ಆರೋಹಿಸಲು ಮೇಲ್ಮೈಯನ್ನು ಪ್ರಮಾಣಿತ ಸ್ಕ್ರೂ ರಂಧ್ರಗಳಿಂದ ಯಂತ್ರ ಮಾಡಬೇಕು ಮತ್ತು ಚಿತ್ರಕಲೆ ಮತ್ತು ಕಪ್ಪಾಗುವಿಕೆ ಮತ್ತು ತುಕ್ಕು ತಡೆಗಟ್ಟುವ ಚಿಕಿತ್ಸೆಯನ್ನು ಕೈಗೊಳ್ಳಬೇಕು.
ವೃತ್ತಿಪರ ಯಾಂತ್ರಿಕ ಸಂಸ್ಕರಣೆಯ ನಂತರ ರೋಟರಿ ಪ್ಲಾಟ್ಫಾರ್ಮ್ ಉತ್ತಮ-ಗುಣಮಟ್ಟದ ಪ್ರೊಫೈಲ್ ಸ್ಟೀಲ್ ಅನ್ನು ಆಯ್ಕೆ ಮಾಡುತ್ತದೆ ಮತ್ತು ಮೇಲ್ಮೈಯನ್ನು ಸ್ಥಾನಿಕ ಉಪಕರಣವನ್ನು ಆರೋಹಿಸಲು ಪ್ರಮಾಣಿತ ಸ್ಕ್ರೂ ರಂಧ್ರಗಳಿಂದ ಯಂತ್ರ ಮಾಡಲಾಗುತ್ತದೆ ಮತ್ತು ಕಪ್ಪಾಗುವಿಕೆ ಮತ್ತು ತುಕ್ಕು ತಡೆಗಟ್ಟುವಿಕೆ ಚಿಕಿತ್ಸೆಯನ್ನು ಕೈಗೊಳ್ಳಬೇಕು.
AC ಸರ್ವೋ ಮೋಟಾರ್ ಮತ್ತು RV ರಿಡ್ಯೂಸರ್ ಅನ್ನು ಪವರ್ ಮೆಕ್ಯಾನಿಸಂ ಆಗಿ ಆಯ್ಕೆ ಮಾಡುವುದರಿಂದ ತಿರುಗುವಿಕೆಯ ಸ್ಥಿರತೆ, ಸ್ಥಾನೀಕರಣದ ನಿಖರತೆ, ದೀರ್ಘ ಬಾಳಿಕೆ ಮತ್ತು ಕಡಿಮೆ ವೈಫಲ್ಯದ ದರವನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಬಹುದು. ವಾಹಕ ಕಾರ್ಯವಿಧಾನವು ಹಿತ್ತಾಳೆಯಿಂದ ಮಾಡಲ್ಪಟ್ಟಿದೆ, ಇದು ಉತ್ತಮ ವಾಹಕ ಪರಿಣಾಮವನ್ನು ಹೊಂದಿದೆ. ವಾಹಕ ಬೇಸ್ ಅವಿಭಾಜ್ಯ ನಿರೋಧನವನ್ನು ಅಳವಡಿಸಿಕೊಳ್ಳುತ್ತದೆ, ಇದು ಸರ್ವೋ ಮೋಟಾರ್, ರೋಬೋಟ್ ಮತ್ತು ವೆಲ್ಡಿಂಗ್ ಪವರ್ ಮೂಲವನ್ನು ಪರಿಣಾಮಕಾರಿಯಾಗಿ ರಕ್ಷಿಸುತ್ತದೆ.
ವಿದ್ಯುತ್ ನಿಯಂತ್ರಣ ವ್ಯವಸ್ಥೆಯು ಸ್ಥಿರ ಕಾರ್ಯಕ್ಷಮತೆ ಮತ್ತು ಕಡಿಮೆ ವೈಫಲ್ಯ ದರದೊಂದಿಗೆ ಸ್ಥಾನಿಕವನ್ನು ನಿಯಂತ್ರಿಸಲು ಜಪಾನೀಸ್ ಓಮ್ರಾನ್ ಪಿಎಲ್ಸಿಯನ್ನು ಅಳವಡಿಸಿಕೊಂಡಿದೆ. ಬಳಕೆಯ ಗುಣಮಟ್ಟ ಮತ್ತು ಸ್ಥಿರತೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ದೇಶ ಮತ್ತು ವಿದೇಶಗಳಲ್ಲಿನ ಪ್ರಸಿದ್ಧ ಬ್ರ್ಯಾಂಡ್ಗಳಿಂದ ವಿದ್ಯುತ್ ಘಟಕಗಳನ್ನು ಆಯ್ಕೆ ಮಾಡಲಾಗುತ್ತದೆ.











